做電機控制和伺服驅動,必看的主控芯片選型方案發表時間:2024-01-27 12:00 伺服電機是指在伺服系統中控制機械元件運轉的發動機,是一種補助馬達間接變速裝置。伺服電機的發展歷程可以追溯到19世紀末期,隨著電力技術的不斷發展,伺服電機的機械、電氣、控制等方面都有了大幅度進展。 2021年12月,工信部、發改委、科技部等十五部門印發《“十四五”機器人產業發展規劃》,提出到2025年,我國成為全球機器人技術創新策源地、高端制造集聚地和集成應用新高地。而伺服電機是整個機器人伺服系統的重要組成部分,機器人產業蓬勃發展的態勢下,伺服電機的發展也得到了有力的支持。  伺服電機的運動控制需要準確的位置反饋信息。隨著高精度位置傳感器技術的發展,如光電編碼器、磁性編碼器等,能夠實時獲取伺服電機的位置信息,并通過反饋控制算法進行精確的位置調整。這些技術的創新使得伺服電機的定位精度進一步提升,滿足了機械臂在高精度操作中的需求。
先楫HPM6280芯片具備出色響應速度快、定位精度高等特點,能夠實現高速、高精度的運動控制。HPM6280高性能MCU目前已應用于電動平行夾爪方案,方案內置FOC算法+H橋驅動芯片,以50K電流環頻率實現4軸步進電機開環控制,步進電機速度>1200RPM,在工業機械臂場景,HPM628 MCU能夠迅速準確地完成各種復雜任務,提高工作效率和生產質量。 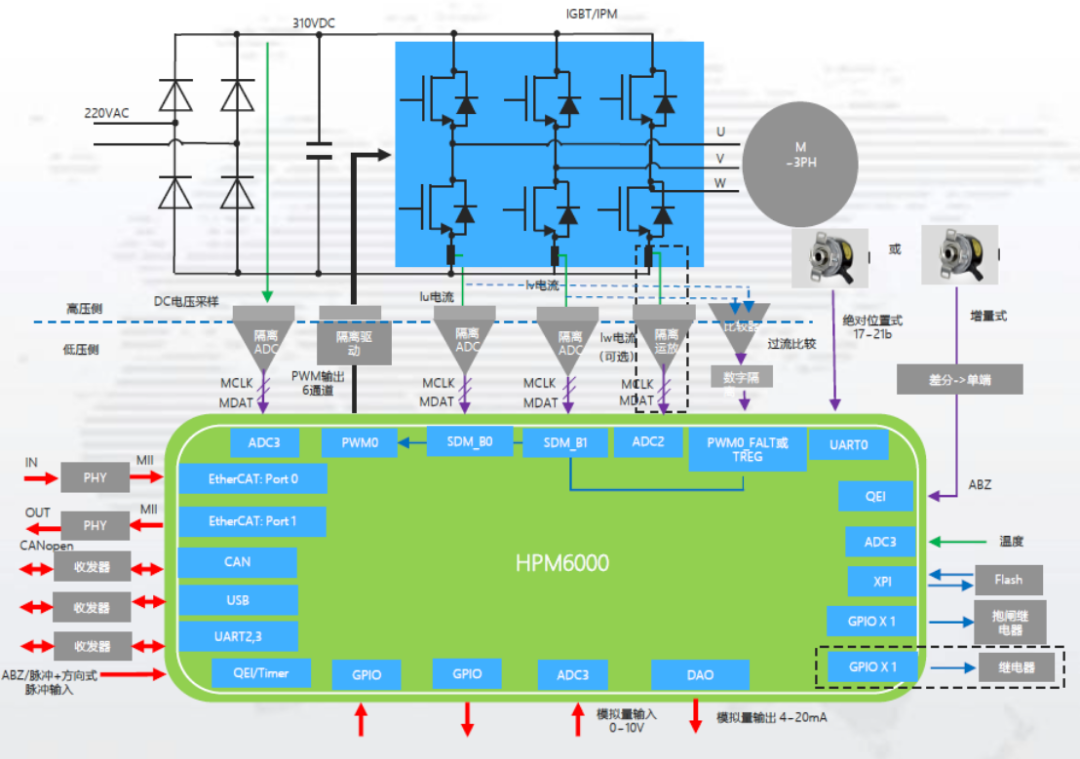  方案優勢:
應用場景: 搬運機械臂、裝配機械臂、焊接機械臂等場景。 |